|
Mikrokontrolery
|
|
|
Układ elektroniczny Układ elektroniczny można przedstawić w postaci układu sterującego oraz połączonych ze sobą bloków spełniających określone funkcje oraz. W urządzeniu zastosowano typowe oraz nowe niekonwencjonalne rozwiązania. Całość tworzą następujące podukłady: |
|
|
- zasilacz z elektronicznie włączanym stabilizatorem napięcia U=+5V, |
|
|
Układ sterujący wykonano przy pomocy
mikrokontrolera AT89C2051. Zadaniem układu sterującego jest: - sterowanie monitorem linii (osiem dwukolorowych diod LED), - wyświetlanie odpowiedniej informacji o monitorowanym porcie, - multipleksowe sterowanie wyświetlaczem LED, - włączanie/wyłączanie podświetlenia wyświetlacza LCD. |
|
|
W zasilaczu urządzenia zastosowano układ
stabilizatora napięcia LM2941. Układ pracuje poprawnie przy spadku
napięcia U3-1=0,9V. W symulatorze sprzętowym zastosowano
osiem przełączników monostabilnych. |
|
|
|
|
| Rys. 1. Schemat zasilacza. | |
Drugi przerzutnik zastosowano w układzie zapobiegającym zjawisku odbijania styków. Generator taktujący, którego schemat przedstawiono na rysunku 2, zaprojektowano w oparciu o linearyzowane bramki NOT (74LS04). |
|
|
|
|
| Rys. 2. Schemat generatora taktującego. | |
|
Cztery bramki są wzmacniaczami cyfrowymi i separatorami sygnału taktującego. W układzie istnieje możliwość wybrania jednej z częstotliwości taktujących: f1=12MHz, f2=11,0592MHz. Użycie częstotliwości f1 umożliwia proste zastosowanie liczników i timerów w celu odmierzania czasu. Zastosowanie częstotliwości f2 ułatwia programowanie i prawidłowe wykonywanie komendy SOUND. Monitor linii sygnałowej zaprojektowano w taki sposób, aby dwukolorowa dioda LED świeciła kolorem czerwonym w stanie wysokim UH, a w stanie niskim UL kolorem zielonym. Schemat monitora linii przedstawiono na rysunku 3. |
|
|
|
|
| Rys. 3. Schemat monitora linii. | |
|
W celu zwiększenia użyteczności urządzenia zastosowano dwa programatory. Pierwszy służy do programowania mikrokontrolera AT89S8252 przez port SPI. Drugi jest programatorem układów AT89Cxx51. W mikrokontrolerach AT89C2051 i AT89C4051 do programowania układu stosowane jest dodatnie napięcie o wartości U=12V. W celu uzyskania odpowiedniego napięcia, zastosowano układu MAX662A firmy Maxim, który jest zasilaczem napięcia programującego pamięci Flash i przetwornicą napięcia charge-pump, DC-DC, 5V/12V. Schemat fragmentu programatora z przetwornicą pokazano na rysunku 4. |
|
|
|
|
| Rys. 4. Schemat przetwornicy napięcia. | |
|
Wyświetlacz LCD, to typowy układ podświetlanego wyświetlacza z dwoma wierszami i szesnastoma kolumnami. W układzie, którego schemat przedstawiono na rysunku 5, zastosowano regulacje kontrastu oraz automatyczny, ręczny i programowy wyłącznik podświetlenia wyświetlacza. |
|
|
|
|
| Rys. 5. Schemat połączenia wyświetlacza LCD. | |
|
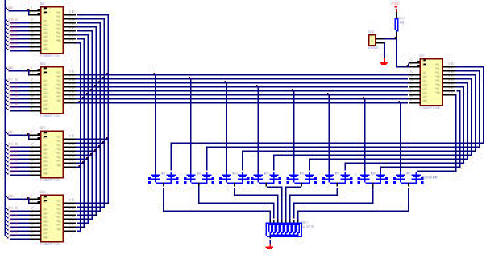
Dwa wyświetlacze siedmiosegmentowe nie wymagają
stosowania metody multipleksowania. Jednak zastosowano ją w celu
wyjaśnienia zasady działania układu i sposobu programowania
mikrokontrolera. Mikrokontroler znajdujący się w urządzeniu, steruje
dwoma wyświetlaczami LED licznika oraz wyświetlaczami LED służącymi do
sygnalizacji wybranego portu. |
|
|
|
|
| Rys. 6. Schemat układu sterowania i wyświetlaczy LED. | |
|
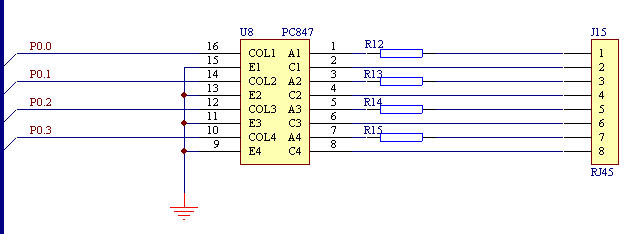
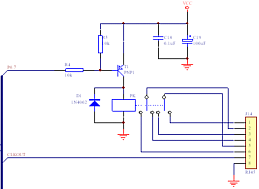
Zastosowanie transoptora umożliwia sterowanie mikrokontrolera z zewnętrznych układów, zasilanych wyższym napięciem od napięcia zasilającego zestaw. W układzie , którego schemat pokazano na rysunku 7, zastosowano poczwórny transoptor PC847. |
|
|
|
|
| Rys. 7. Schemat układu transoptora. | |
|
W celu umożliwienia sterowani zewnętrznych urządzeń z oddzieleniem galwanicznym, zastosowano przekaźnik. Schemat układu przedstawiono na rysunku 8. Styki przekaźnika można połączyć do napięcia sieci U=230V i obciążyć je prądem o natężeniu Imax=0,2A. Rozszerza to znacząco zakres zastosowań układu. Możliwym jest sterowanie odbiornikami o charakterze rezystancyjnym lub indukcyjnymi i mocy nie przekraczającej P≤400VA. |
|
|
|
|
| Rys. 8. Schemat wzmacniacza z przekaźnikiem. | |
|
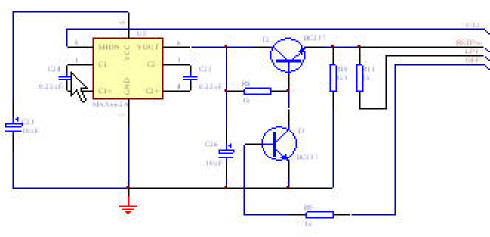
W przypadku zastosowania zasilania o napięciu z zakresu U=(15-24)V w układzie stabilizatora zostanie wydzielona moc przekraczająca wartość dopuszczalną. Niezbędne jest odprowadzenie wydzielanego ciepła na zewnątrz obudowy. W tym celu zastosowano wentylator z układem automatycznej regulacji prędkości obrotowej, którego schemat pokazano na rysunku 9. |
|
|
|
|
| Rys. 9. Schemat regulatora prędkości obrotowej wentylatora. | |
|
W zestawie dydaktycznym zastosowano zegar czasu rzeczywistego. Jest to układ PCF8773. Programowanie układu i odczyt danych w postaci czasu i daty odbywa się za pomocą szyny I2C. W celu podtrzymania działania zegara podczas odłączania napięcia zasilającego, zastosowano ogniwo litowe CD3032. Schemat układu przedstawiono na rysunku 10. Dodatkowo do szyny I2C dołączono pamięć EEPROM typu AT24C04 umożliwiającą zapisanie 512 bajtów danych. |
|
|
|
|
| Rys. 10. Schemat zegara i pamięci EEPROM | |
|
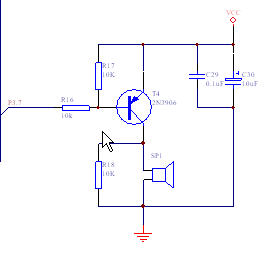
Mikrokontroler AT89S8252 posiada 1kB pamięci EEPROM przeznaczonej na zapisywanie danych. Jednak układy z serii AT89Cxx51 nie posiadają tej pamięci, stąd konieczność stosowania pamięci zewnętrznej. Sygnalizator dźwiękowy umożliwia tworzenie prostych sekwencji dźwiękowych. Schemat wzmacniacza z przetwornikiem piezoelektrycznym, pokazano na rysunku 11. |
|
|
|
|
| Rys. 11. Schemat sygnalizatora dźwiękowego. | |
|
Konstrukcja
Przedstawione schematy podukładów zebrano na
trzech schematach przeznaczonych do wykonania list elementów i ich
połączeń. Listy połączeń umożliwiły zaprojektowanie trzech osobnych
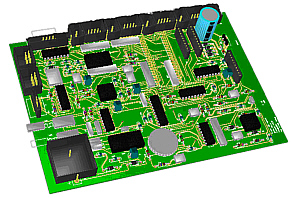
obwodów drukowanych PCB. Konstrukcja składająca się z trzech płytek
drukowanych została umieszczona w obudowie Z-33A o wymiarach 210x145.
Urządzenie zawiera trzy płytki drukowane – dolną, górną oraz
płytkę z podstawkami. |
|
 |
|
 |
|
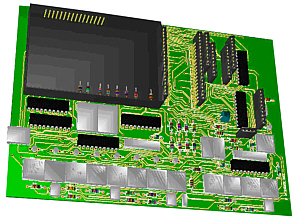
| Rys. 12. Wizualizacja 3D płytek drukowanych zestawu dydaktycznego. | |
|
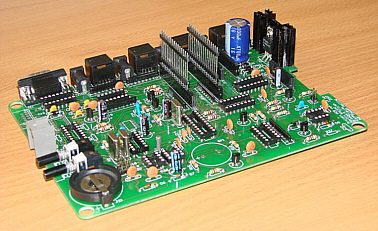
Wizualizacja 3D umożliwiła wykonanie wstępnej weryfikacji konstrukcji. W końcowej konstrukcji zmieniono położenie wyświetlacza LCD oraz rozmieszczenie przycisków sterujących. Zostały one odsunięte od pozostałych, tworząc oddzielną grupę. Płytki z częściami elektronicznymi, odpowiadające wizualizacji przedstawionej na rysunku 12 pokazano na rysunku 13. |
|
 |
|
 |
|
| Rys. 13. Widok płytek obwodów drukowanych zestawu dydaktycznego. | |
|
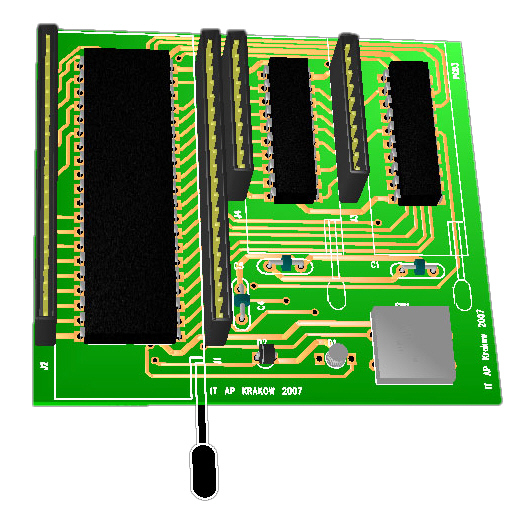
Na rysunkach nie przedstawiono zewnętrznego zasilacza prądu stałego. Odpowiednia konstrukcja stabilizatora znajdującego się wewnątrz zestawu, umożliwia dołączenie zasilacza napięcia stałego lub przemiennego o wartości napięcia U=(7,5-24)V i wydajności prądowej Imin=0,8 A. Rysunek 14 przedstawia wizualizację oraz płytkę programatora z podstawkami pod mikrokontrolery. Zastosowanie podstawek typu ZIF umożliwia programowanie i testowanie wielu mikrokontrolerów. Dwie podstawki ZIF20 zastosowano w celu oddzielenia układu programatora od układu symulatora. Na rysunkach 15 i 16 przedstawiono widoki boczne zestawu dydaktycznego, a rysunek 17 pokazuje front urządzenia. |
|
 |
 |
| Rys. 14. Wizualizacja 3D i widok płytki z podstawkami ZIF programatora. | |
 |
|
| Rys. 15. Widok boczny urządzenia. | |
 |
|
| Rys. 16. Widok boczny urządzenia. | |
 |
|
| Rys. 17. Widok frontu urządzenia. | |
|
Projekt urządzenia zrealizowano z myślą o zastosowaniu w celach dydaktycznych. Małe gabaryty zestawu zwiększają jego mobilność i umożliwiają zastosowanie w każdej pracowni komputerowej. Podłączając zestaw na stanowisku komputerowym można przeprowadzać zajęcia z programowania mikrokontrolerów. Prosta i ergonomiczna konstrukcja pozwala nawet początkującym na korzystanie z szerokich możliwości urządzenia. Prezentowany zestaw dydaktyczny może być używany zarówno przez początkujących jak i zawansowanych amatorów programowania mikrokontrolerów. Intuicyjna obsługa oraz możliwość natychmiastowego sprawdzenia napisanych programów dają efekty w postaci szybkiej, a zarazem ciekawej nauki programowania. Możliwość dołączenia urządzeń zewnętrznych, rozszerza zakres tematyki ćwiczeń oraz umożliwia realizację procesu dydaktycznego w bardziej atrakcyjny sposób. |
|






Copyright © 2014 Designed by Free CSS Templates | Darmowe Szablony